Terrestrial Robotic Limbed and Limbless Locomotion
Collaborators: Tianyu Wang, V. H. Kojuoharov, J. Maeng, Daniel I. Goldman
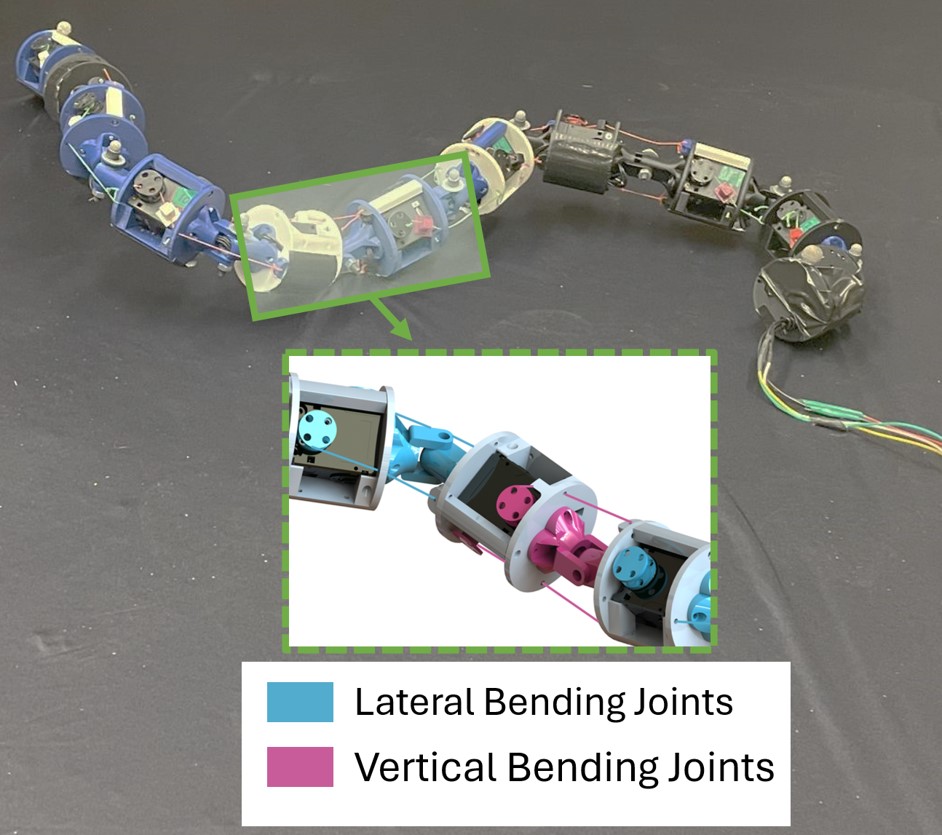
This untethered limbless robot was developed to investigate mechanical intelligence in cluttered aquatic environments. Drawing inspiration from organismal muscle actuation, it employs a bilateral cable-driven mechanism to achieve programmable anisotropic body compliance, enabling emergent undulatory swimming through complex hydrodynamic regimes. Robophysical experiments reveal that, as in terrestrial locomotion, the right combination of body compliance and undulation frequency is essential for effective open-loop swimming in heterogeneous environments. Additionally, a real-time controller using cable tension feedback allows adaptive body compliance, enhancing the robot’s robustness and speed in unpredictable aquatic conditions.

Related Publications & Abstracts
Peer-Reviewed Publications
- V. H. Kojuoharov, T. Wang, M. Fernandez, J. Maeng, D. I. Goldman. Anisotropic body compliance facilitates robotic sidewinding in complex environments. IEEE International Conference on Robotics and Automation (ICRA), 2024.
Conference Abstracts
- V. H. Kojuoharov, T. Wang, M. Fernandez, J. Maeng, D. I. Goldman. Anisotropic body compliance facilitates robotic sidewinding in complex environments. American Physical Society Meeting, March 2024.
Highlights
- Developed proprioceptive sensing joints for centipede-inspired robot
- Designed and tested cord-driven snake-inspired robot for sidewinding
- Investigated body compliance and mechanical intelligence in serpentine locomotion