AquaMILR+ Limbless Robot
Collaborators: Tianyu Wang, Galen Tunnicliffe, Donoven Dortilus, Peter Gunnarson, John O. Dabiri, Daniel I. Goldman
A novel untethered limbless robot designed for complex aquatic terrain navigation. This project was accepted to ICRA 2025 and features advanced mechanical intelligence for robust movement in challenging environments.
Rendering of AquaMILR+ in the open ocean
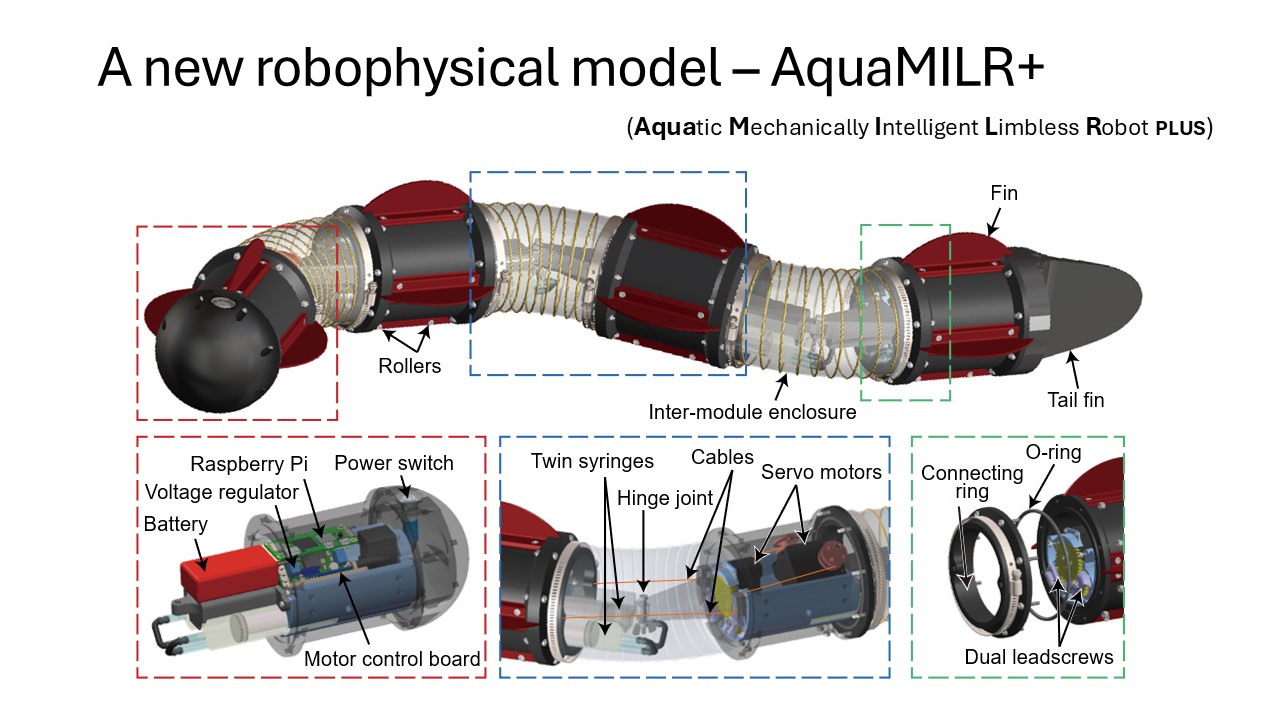
CAD Design

Full Assembly
Electronics Module
Buoyancy Module
Depth Control System
Patent Pending
Demo Video
Preview: ICRA 2025 Paper (PDF)
View Published Paper on IEEE
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Related Publications & Abstracts
Patent
- M. Fernandez, T. Wang, D. I. Goldman. Compact buoyancy control assembly for underwater robotic systems or equipment (filed patent application 2024)
Peer-Reviewed Publications
- M. Fernandez, T. Wang, G. Tunnicliffe, D. Dortilus, P. Gunnarson, J.O. Dabiri, D. I. Goldman. AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation. arXiv:2409.18383 (accepted ICRA 2025)
- T. Wang, N. Mankame, M. Fernandez, V. H. Kojuoharov, D. I. Goldman. AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments (accepted ICRA 2025)
Conference Abstracts
- M. Fernandez, T. Wang, G. Tunnicliffe, D. Dortilus, D. I. Goldman. Design of an untethered limbless robot for aquatic locomotion in complex environments. American Physical Society Meeting, March 2025.
- T. Wang, M. Fernandez, G. Tunnicliffe, D. Dortilus, D. I. Goldman. Mechanical and computational intelligence enable agile and robust limbless robotic locomotion in complex aquatic environments. American Physical Society Meeting, March 2025.
- M. Fernandez, T. Wang, G. Tunnicliffe, D. Dortilus, D. I. Goldman. Design of an untethered underwater limbless robot for complex aquatic terrain navigation. SICB Annual Meeting, January 2025.
- T. Wang, M. Fernandez, G. Tunnicliffe, D. Dortilus, D. I. Goldman. Mechanically intelligent undulatory robotic locomotion in complex aquatic environments. SICB Annual Meeting, January 2025.
Presentations
- Design of an untethered limbless robot for complex aquatic terrain navigation. IEEE International Conference on Robotics and Automation (ICRA), 2025.
- Design of an untethered limbless robot for aquatic locomotion in complex environments. American Physical Society Meeting, March 2025.
- Mechanically intelligent undulatory robotic locomotion in complex aquatic environments. College of Science Undergraduate Research Showcase, February 2025.
- Design of an untethered underwater limbless robot for complex aquatic terrain navigation. SICB Annual Meeting, January 2025