MORPH Robot
Collaborators: Arunn Sankar, Mason Shackleford, Harbin Singh, Dante Santaniello
MORPH is a legged robot designed for dynamic locomotion and complex terrain navigation. The robot features advanced mechanical design with coaxial motors, precision leg mechanisms, and integrated electronics for robust walking and stability control.
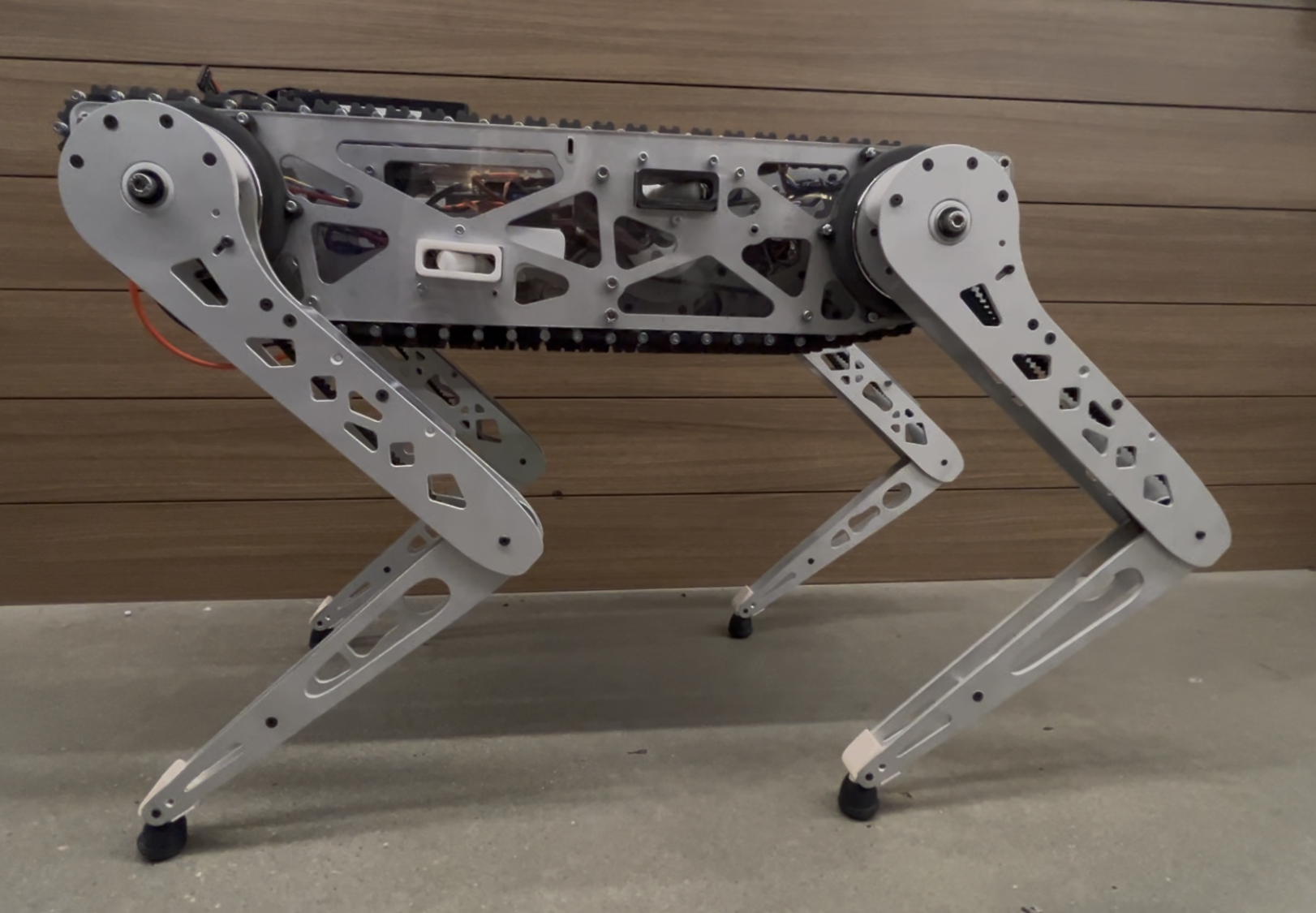
MORPH Robot
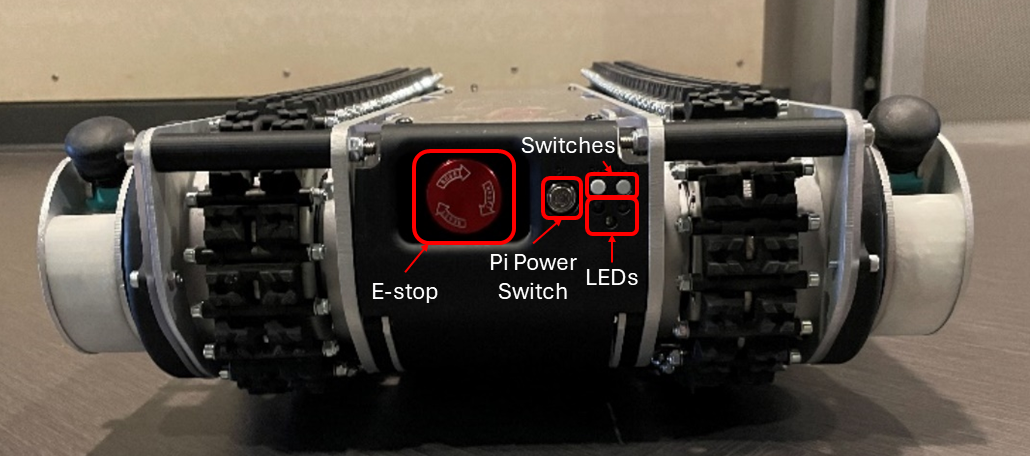
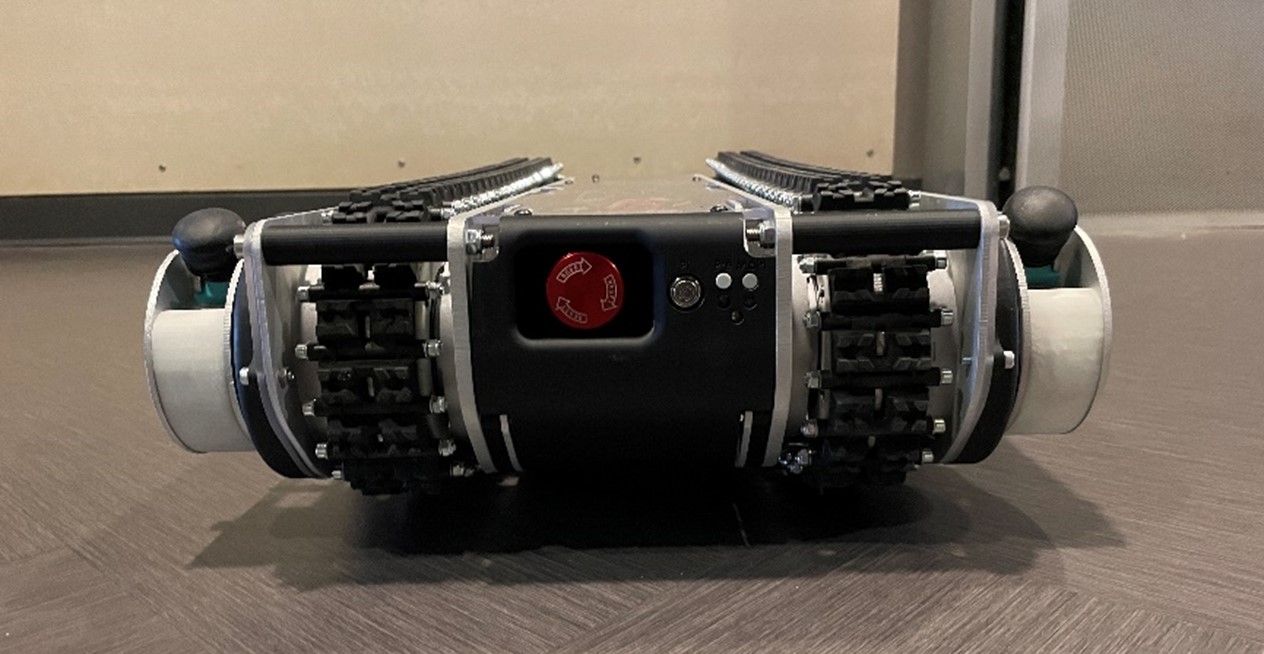
MORPH Robot - Labeled Front View
Key Features
- Dynamic legged locomotion with stability control
- Coaxial motor design for compact actuation
- Precision leg mechanisms with cable retraction
- Integrated electronics and control systems
- 3D printed and waterjet manufactured components
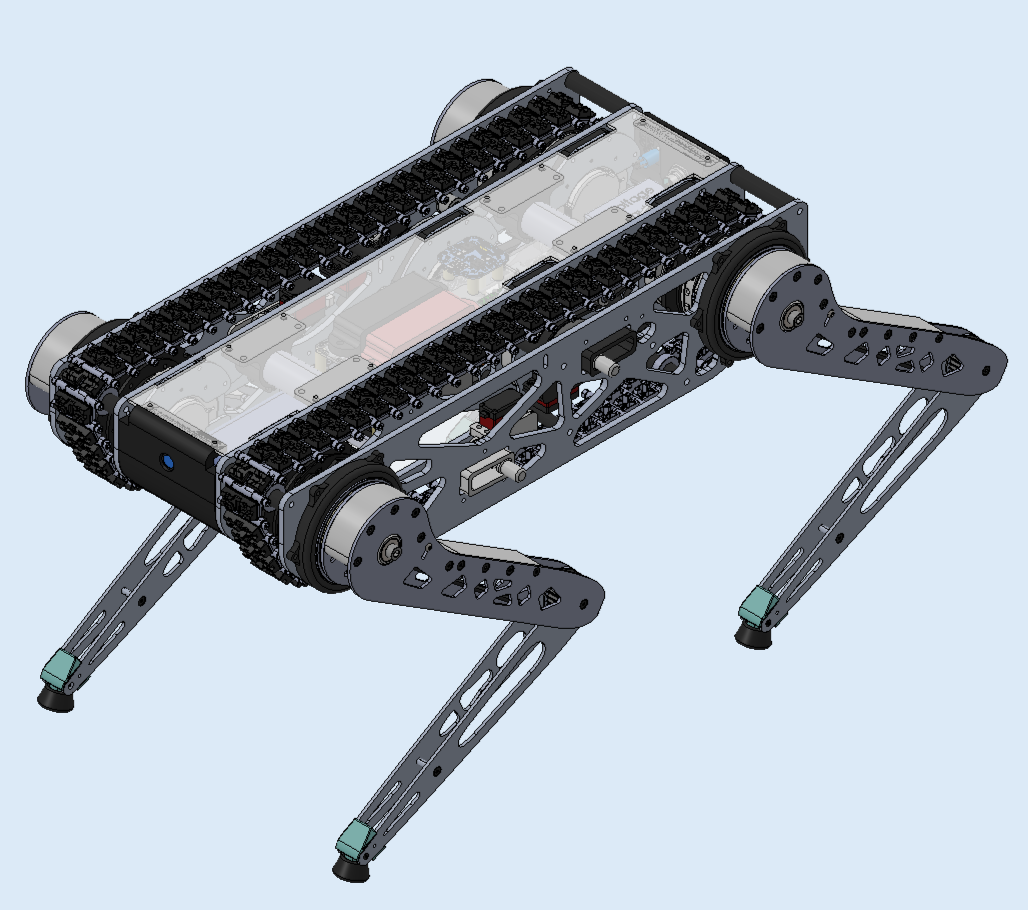
MORPH CAD Design
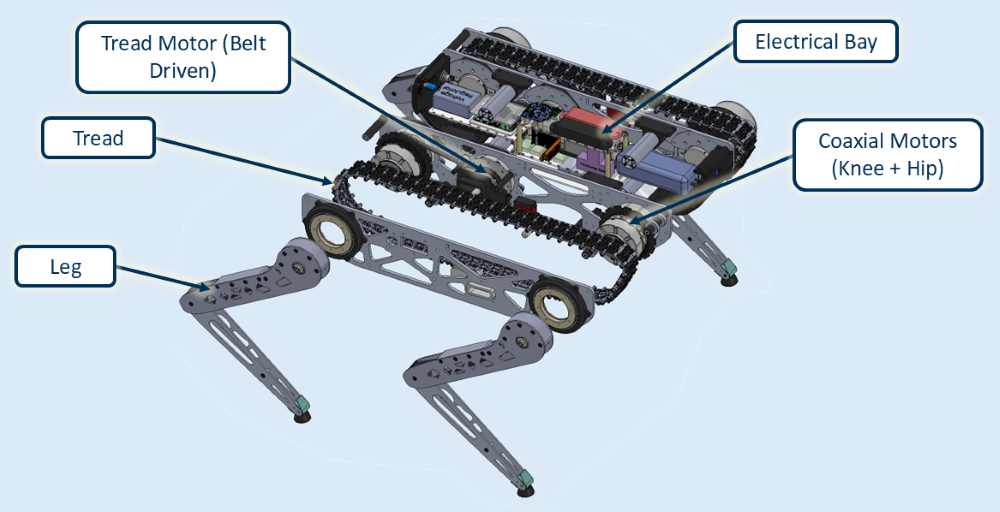
MORPH Exploded Assembly View
Mechanical Design

Leg Design
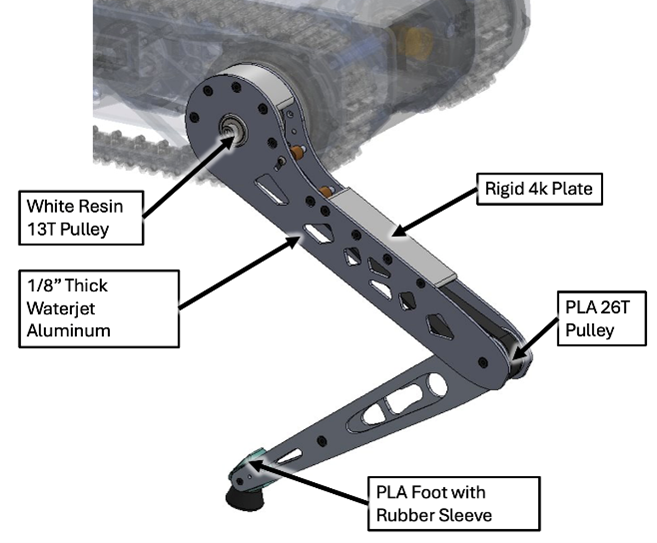
Leg Schematic
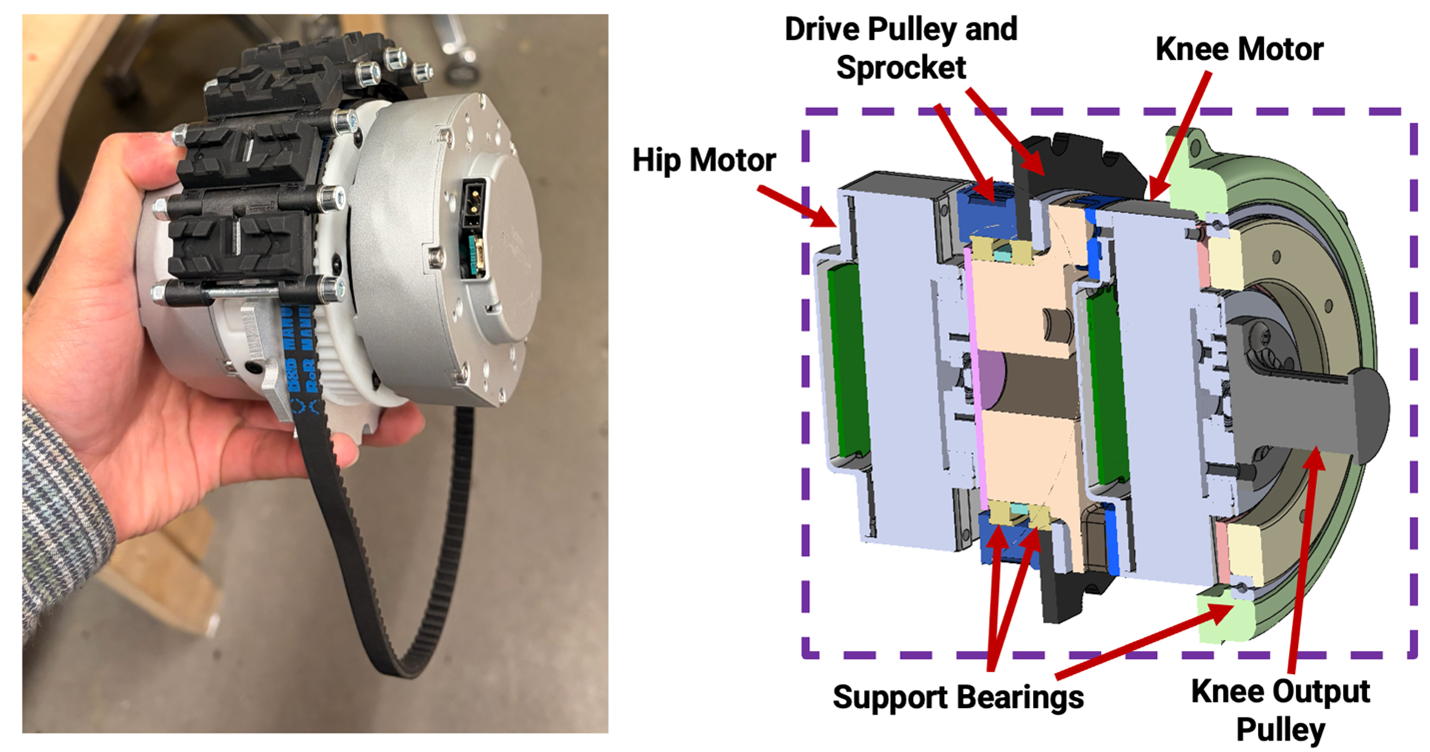
Coaxial Motor Design
Electronics & Control
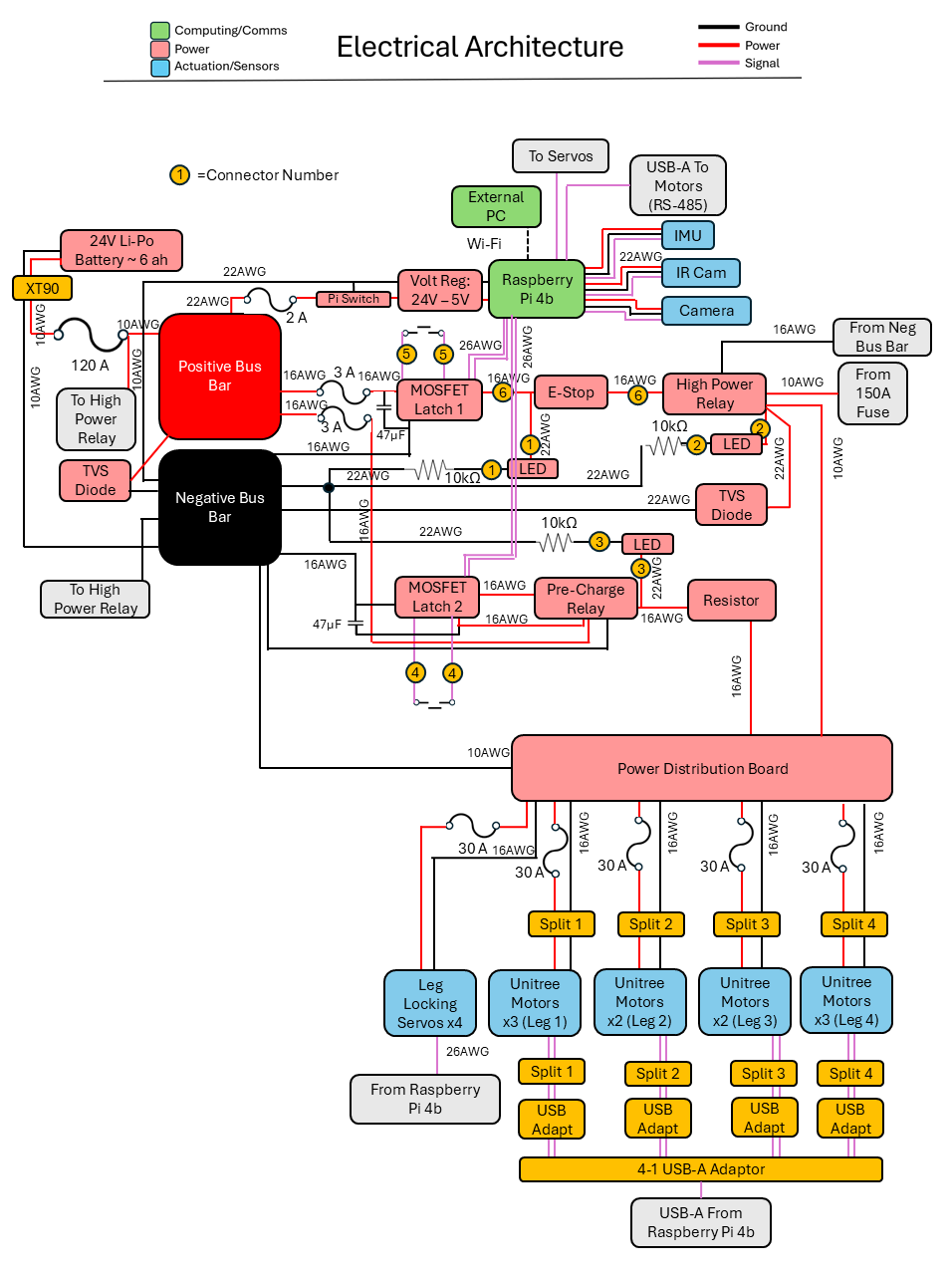
Electrical Schematic
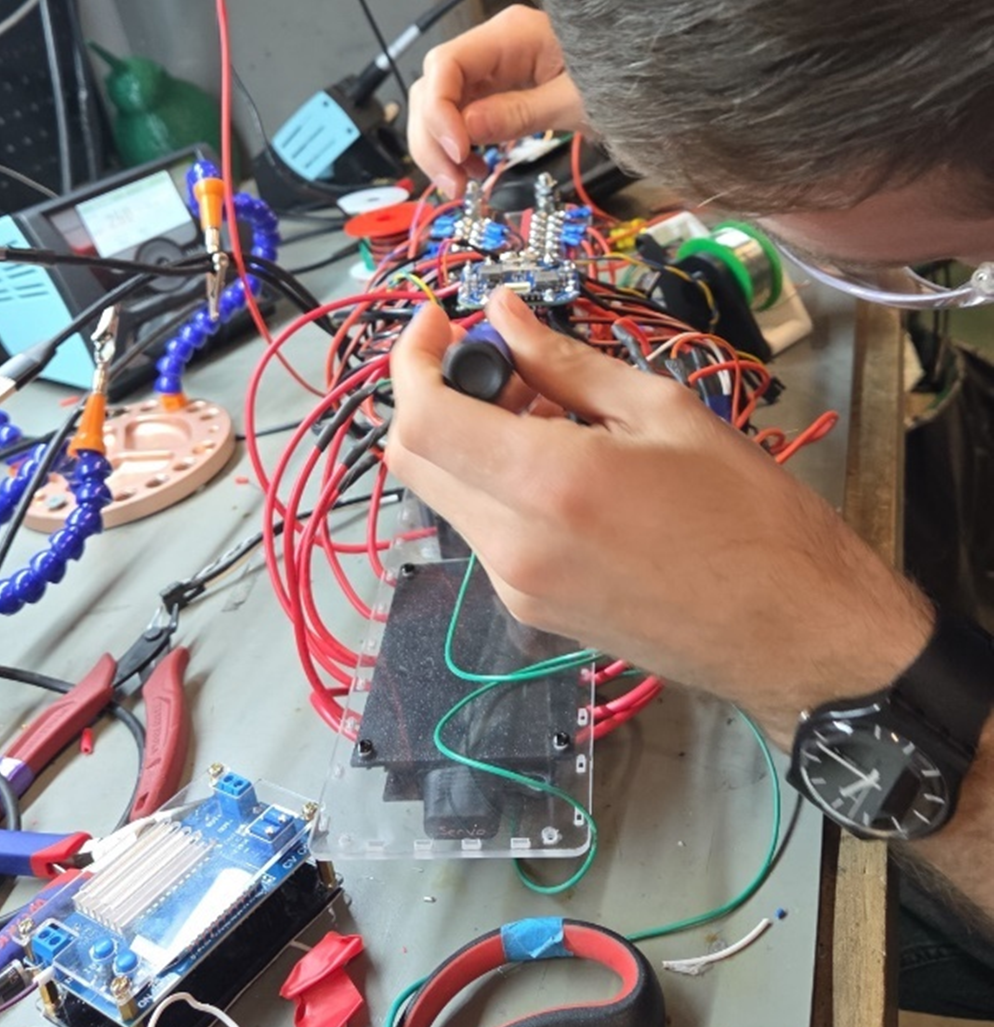
Electronics Assembly
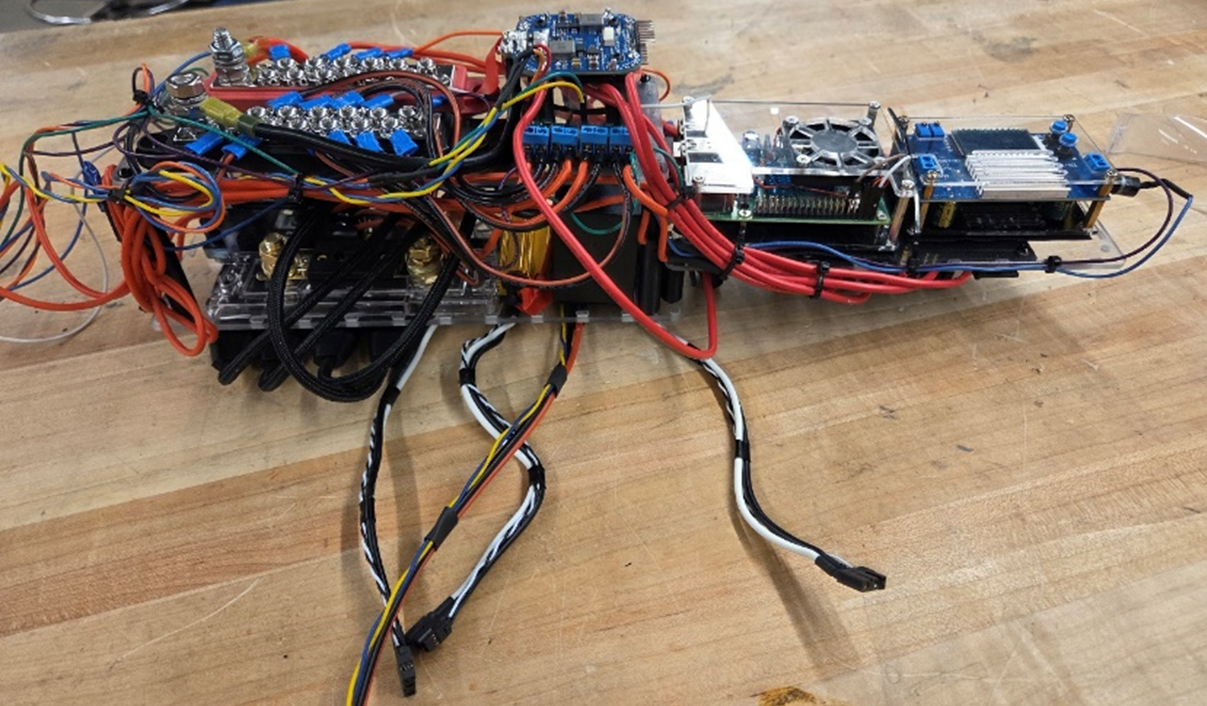
Electrical Assembly
IO Panel
Manufacturing
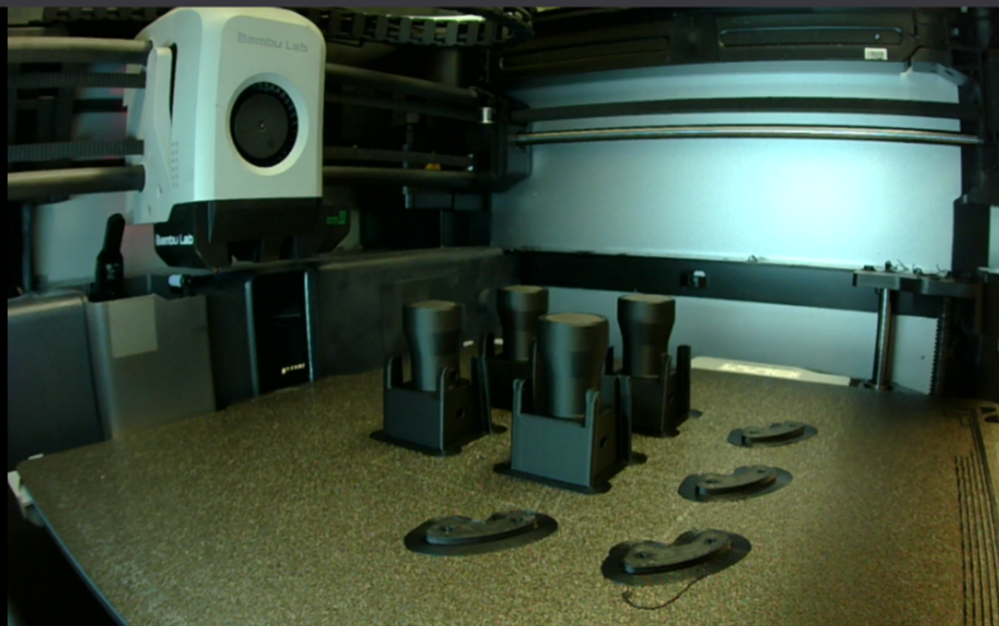
3D Printing Process

Waterjet Manufacturing

Assembly Process

Chassis Design
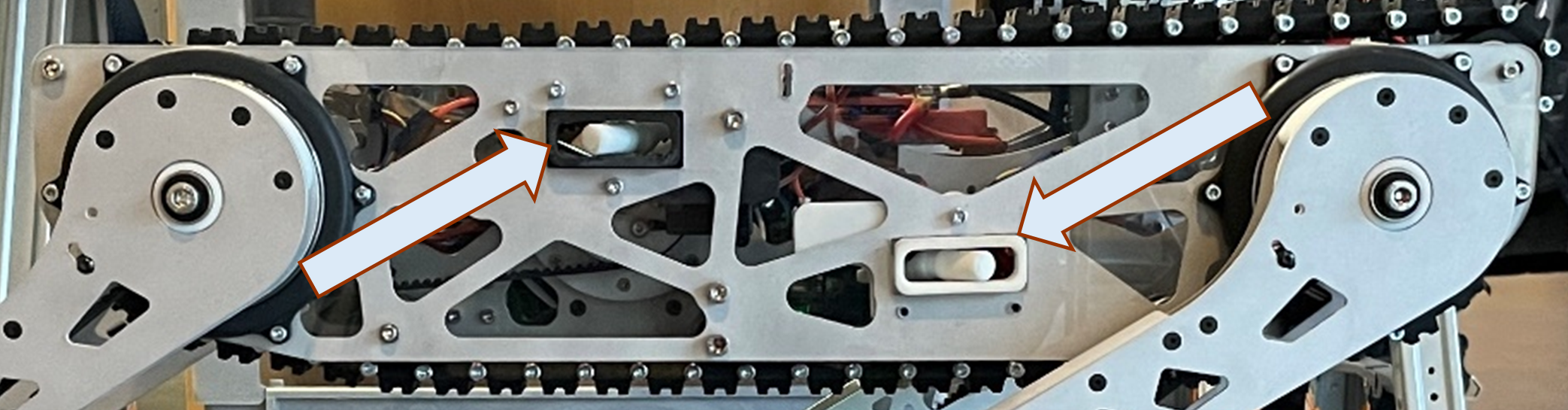
Servo Cutouts
Stability & Control
Stability Triangle Analysis
Bill of Materials
Videos
Gait Animation
Ramp Walking
Ramp Standing
Simulation vs Walking
Robot Catch Demonstration
Tank Point of View