NASA Jet Propulsion Laboratory
Collaborators: Arash Kalantari, Alex Brinkman, Kalind Carpenter, Matthew Gildner, Justin Jenkins, David Newill-Smith, Jeffrey Seiden, Allen Umali, Ryan Mccormick
Key Contributions
- Developed architecture and prototypes of an ultra-lightweight manipulation system for the Sample Recovery Helicopter (SRH) as part of the Mars Sample Return mission
- Prototyped and presented primary architectures to senior board selected for SRH mission implementation
- Conceptualized and prototyped more than 8 unique end-effectors for mission concept proposals and testing
- Prototyped and presented a 3-DOF robotic arm for helicopter integration using Python for inverse kinematics and control, SOLIDWORKS for design, and MATLAB for force analyses
- Created automated robotic arm sequences for iterative gripper testing, writing a Python class library for motor control and using ROS for communication and sequencing

Sample Recovery Helicopter (SRH) - Mars Sample Return
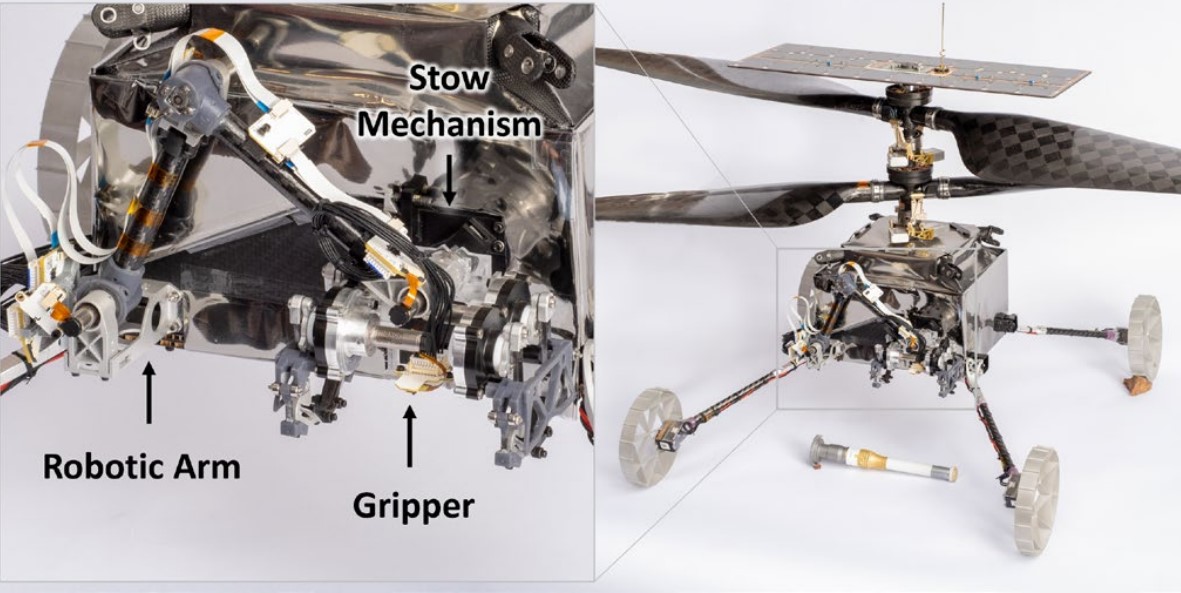
JPL Robotic Manipulation System - Lab Prototype