Collaborators: URC Mars Rover Team (RoboJackets)
Mechanical Lead for semi-autonomous rover for the University Rover Challenge.
Key Contributions
- Led 25 engineers in the design and manufacture of a semi-autonomous rover for complex missions in simulated Martian terrain to compete in the University Rover Challenge
- Utilized SOLIDWORKS for the development of full carbon fiber-based rocker-bogie drive train and chassis, high-precision arm, manipulator, and scientific sampling device
- Designed and assembled 5 degree of freedom robotic arm capable of lifting a 5 kg payload
- Created a soft precision gripper for intricate and sensitive manipulations of unknown geometries

URC Mars Rover - Competition Vehicle
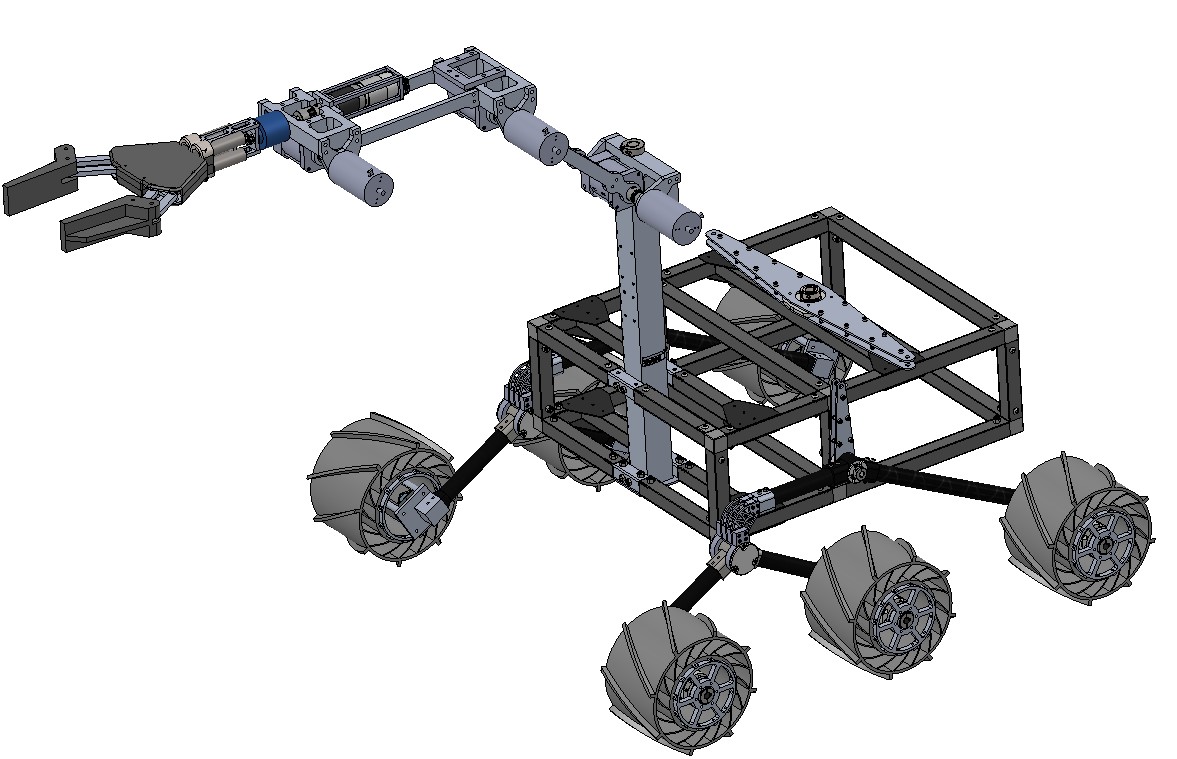
URC Mars Rover - Full CAD Assembly
URC Mars Rover - 3D Model
URC Mars Rover - Robotic Arm 3D Model